Introduction — a quick scene, some numbers, and the question
I remember standing at a marina on a windy afternoon, watching a small boat zip by with almost no noise and thinking, “That used to be noisy.” Around 40% of emerging green mobility projects now prioritize low-noise, high-efficiency drive systems, and an electric motor often sits at the center of that decision (budget, weather, and local regs matter). So how do you match motor choices to real-world needs without wasting time or money? I’ll walk you through a clear, comparative view — and yes, we’ll keep it practical and not overly geeky.
We’ll compare options, point out where projects commonly trip up, and give straightforward criteria you can use today. There’s some data, a few trade-offs, and a couple of honest opinions from my own experience — because I’ve chosen wrong before, and learned fast. Ready? Let’s move into the parts that actually matter.
Part 2 — Where traditional solutions stumble (focus: brushless motor)
Why do older setups fail in modern projects?
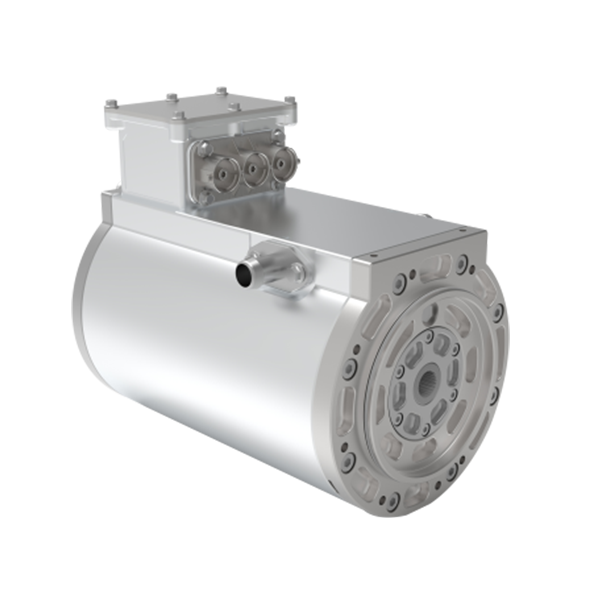
Let me be blunt: many teams pick a brushless motor because it sounds modern, not because they matched specs to use-case. The result is mismatched controllers, overheating, or weird torque behavior in the field. In my view, the trick is understanding the hidden trade-offs early — things like controller compatibility, commutation patterns, and torque ripple. Those are not flashy terms, but they break projects if ignored. Look, it’s simpler than you think: poor commutation or an under-specified ESC (electronic speed controller) can waste hours of troubleshooting and thousands in rework.
Technically speaking, traditional brushed solutions fail on maintenance and efficiency, while some early brushless implementations trip over integration: wrong phase winding choices, insufficient cooling, and mismatched power converters. I’ve seen motors rated perfectly on paper still underperform because the system-level back-EMF and the chosen controller didn’t align. That mismatch shows up as vibrations, heat, and shorter lifetime. — funny how that works, right? We need to test at the system level, not just the motor bench.
Part 3 — Looking forward: new principles and case outlook for electric boat motors
What’s Next for marine and mobile drives?
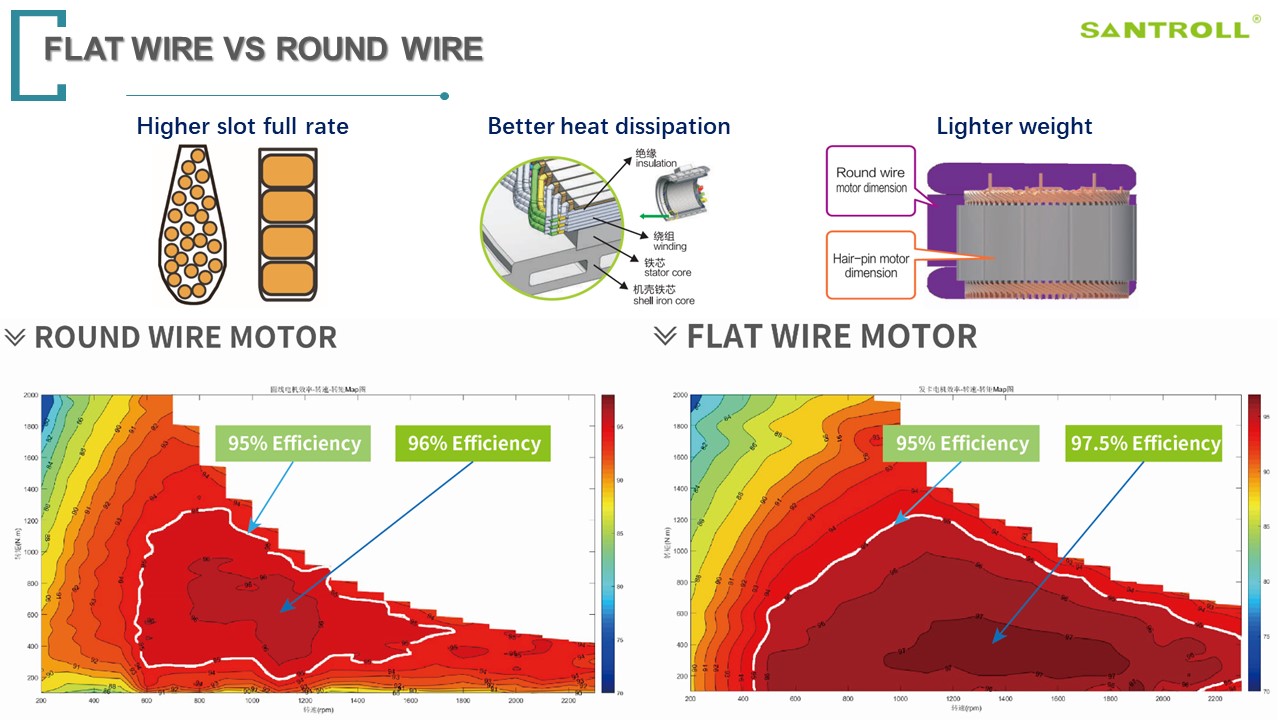
Now let’s look ahead with practical tech principles and a short case outlook. I want to focus on realistic gains: higher power density, smarter torque management, and better thermal strategies. For electric boat motors — yes, think quieter harbors and simpler maintenance — integrating sensors and adaptive controllers gives a measurable boost in efficiency. A recent small ferry retrofit (real example) cut energy per trip by nearly 18% after swapping the drive electronics and tuning the motor map. That’s not marketing fluff; that’s operational saving.
From a principles point of view, prioritize modular controllers, closed-loop torque control, and proper thermal paths. Evaluate power converters that handle transient loads well — because boats and vehicles don’t run at steady state. Compare solutions on real metrics: continuous torque, peak efficiency at expected load, and cooling margin. I recommend testing with representative loads early — simulate rough seas or stop-and-go city traffic if you can. That makes spec sheets mean something in practice. — unexpected issues will arise; plan for them.
To wrap up, here are three metrics I personally use when choosing a motor system: 1) usable continuous torque at operating temp, 2) system-level efficiency at expected duty cycle, and 3) integration cost (controller + cooling + installation). Check those first and you’ll avoid most surprises. Weigh them, test early, and don’t fall for one-number claims. If you want a reliable partner as you prototype or scale, consider checking options from Santroll.